A
recent assignment at TRI
Technologies made it possible for me to get back to my
first love, BEAM. Nathulal and Bhola
crawled and wiggled their way into the new world a few weeks
ago. Nathulal is a walker while Bhola is a phototrophic head.
Both are based on the bicore principle.
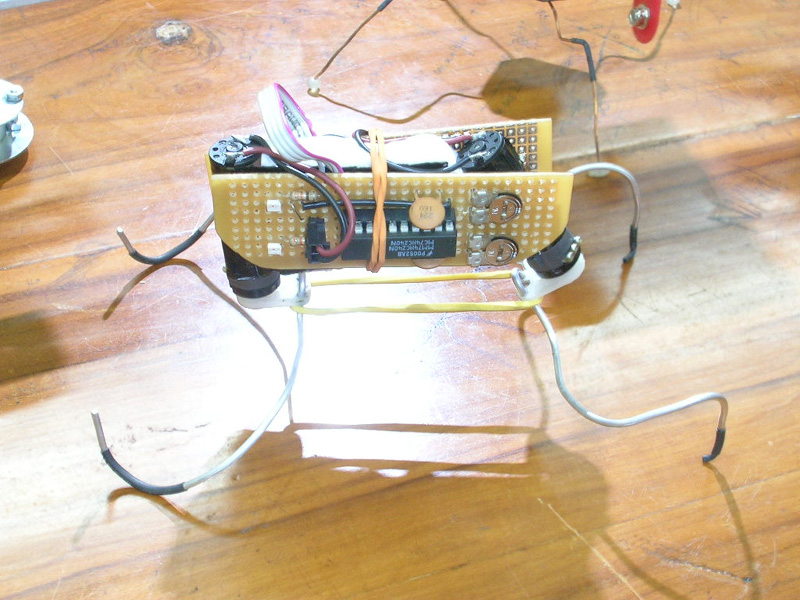
Nathulal uses a master-slave bicore arrangement
to churn out appropriate walking gait patterns. A detailed
explanation about such an arrangement is neatly explained
on this
site. A few issues related to the leg geometry still needs
to be sorted out, but the overall design is functional.
(click
to enlarge)
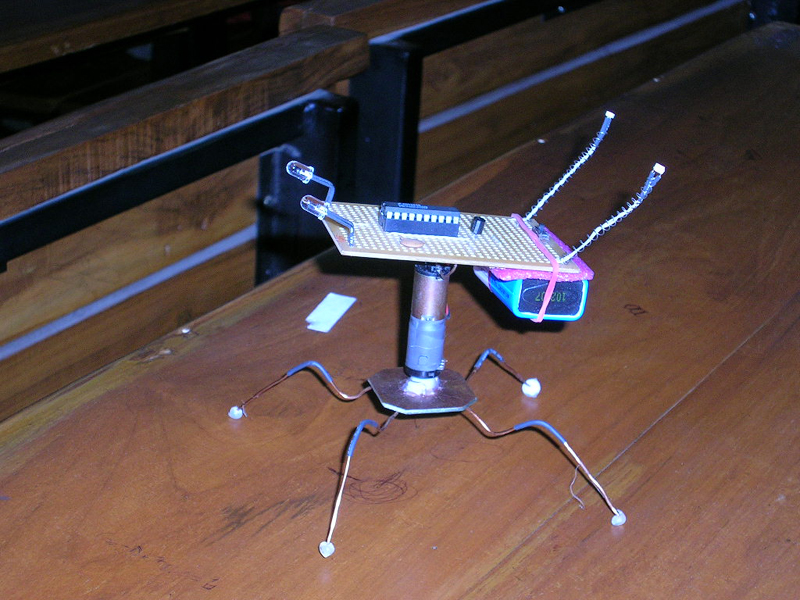
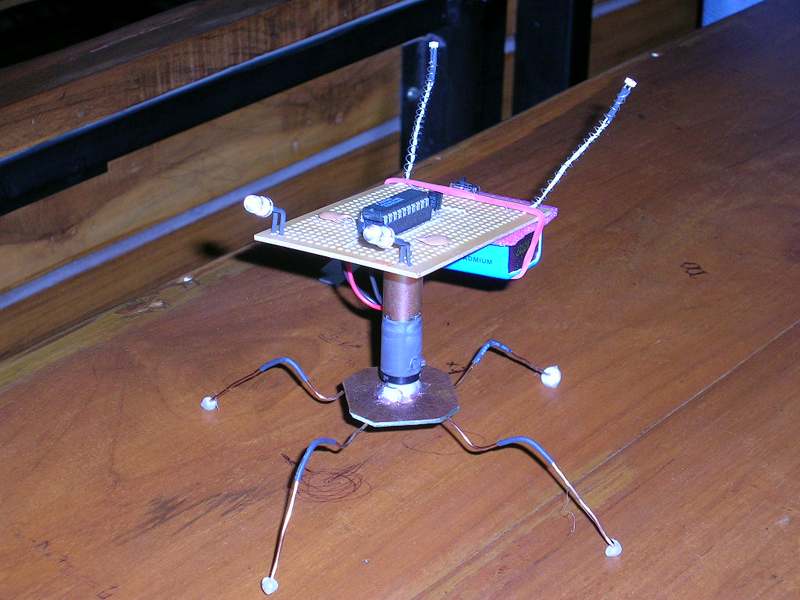
Nathulal
in the limelight
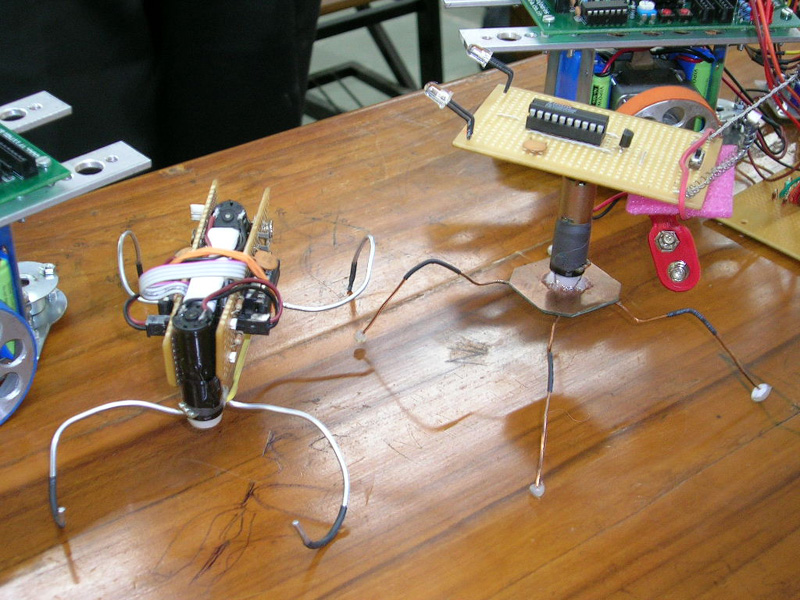
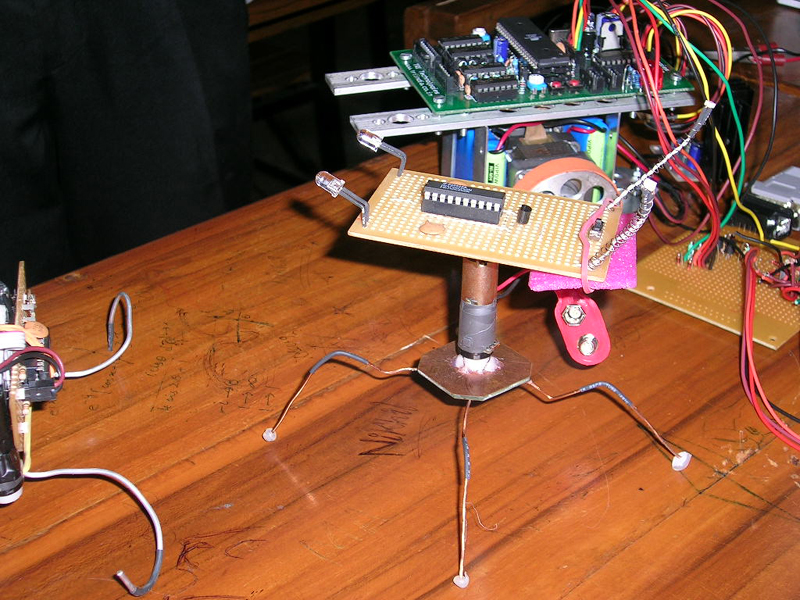
Two
buddies together
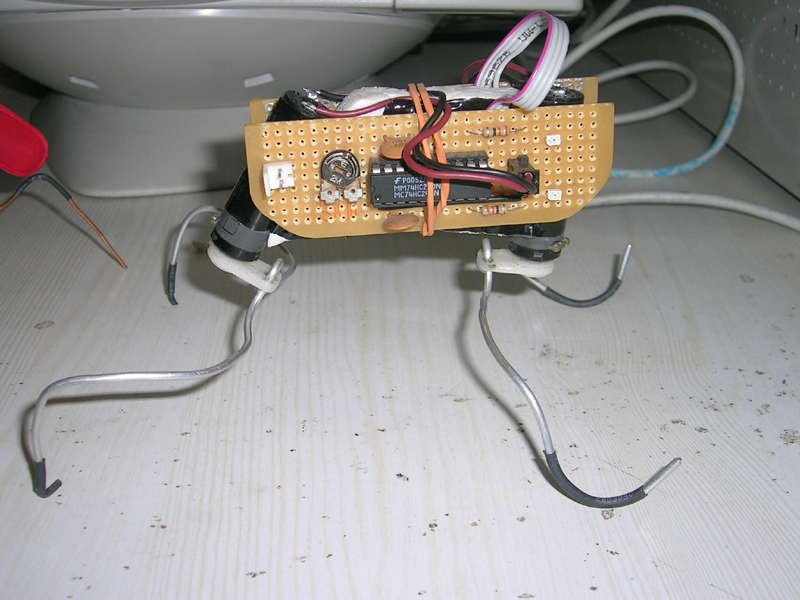
Need
some leg fixing here
Control
board unplugged
The
basic skeleton
Legs
mounted on the shaft
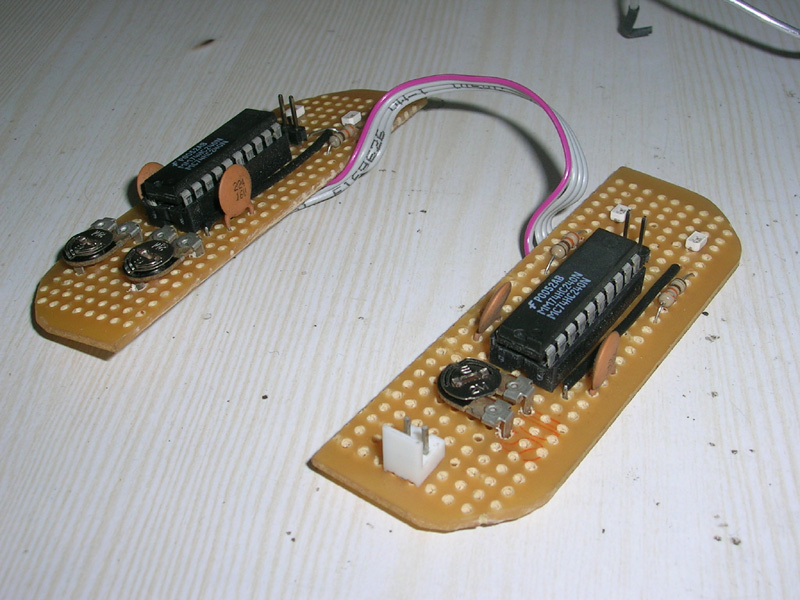
Master-Slave
Boards
Connected
together with a bus
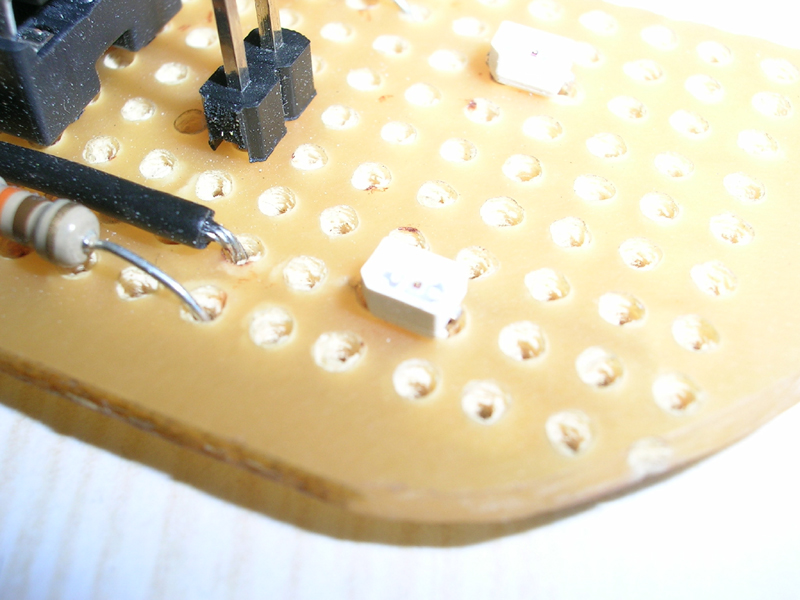
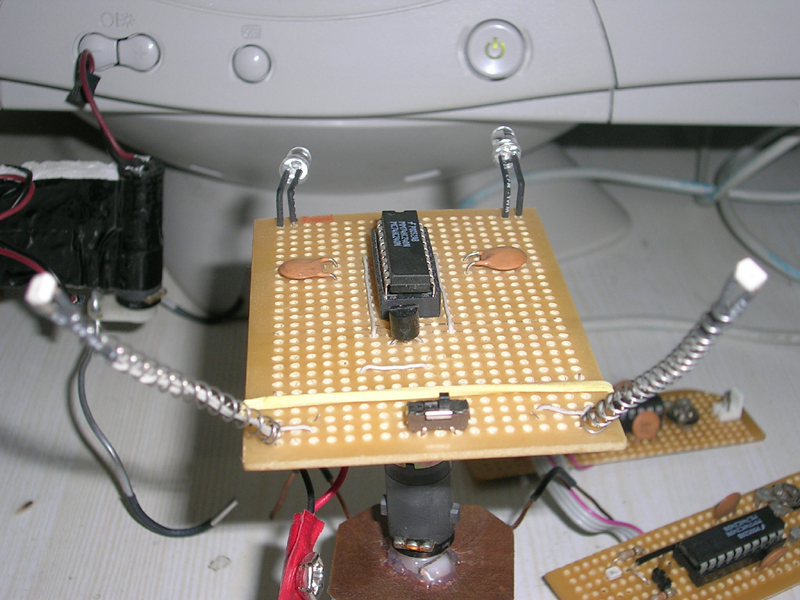
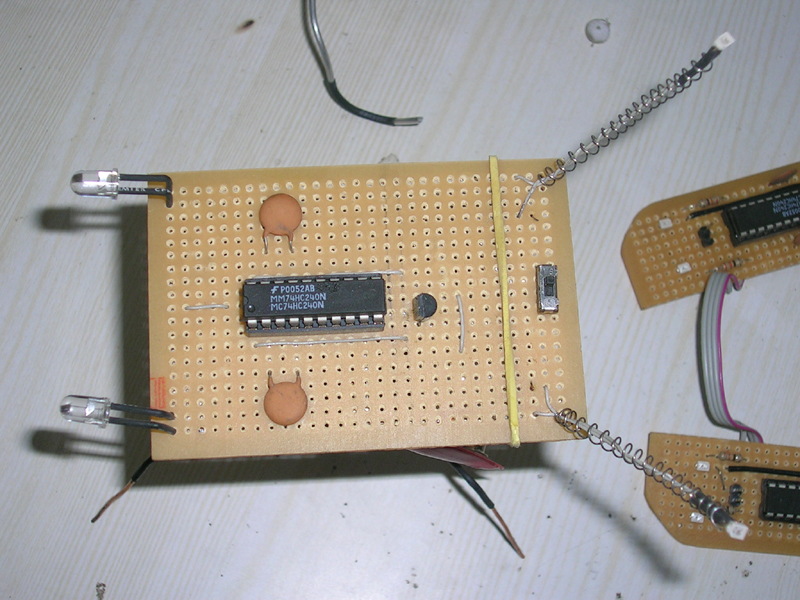
Yeah,
those are the smd leds
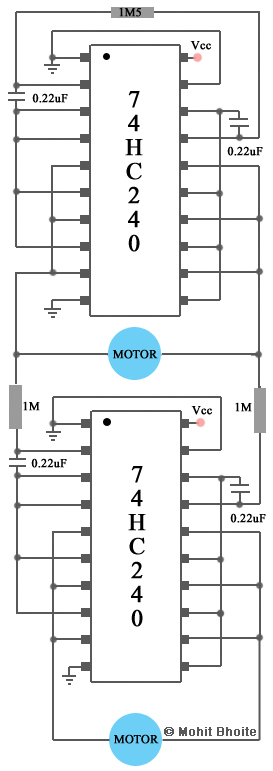
Schematic:
Note:
Replace the resistors with presets of value 1M5 and adjust
them to get the correct timings.
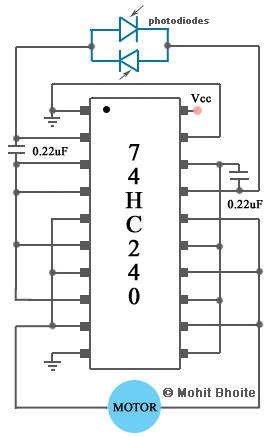
Bhola is a classic BEAM head that uses phototrophic
bicore to control its movements.
Look
here buddy
Hmm..
thats better
Lost
again...
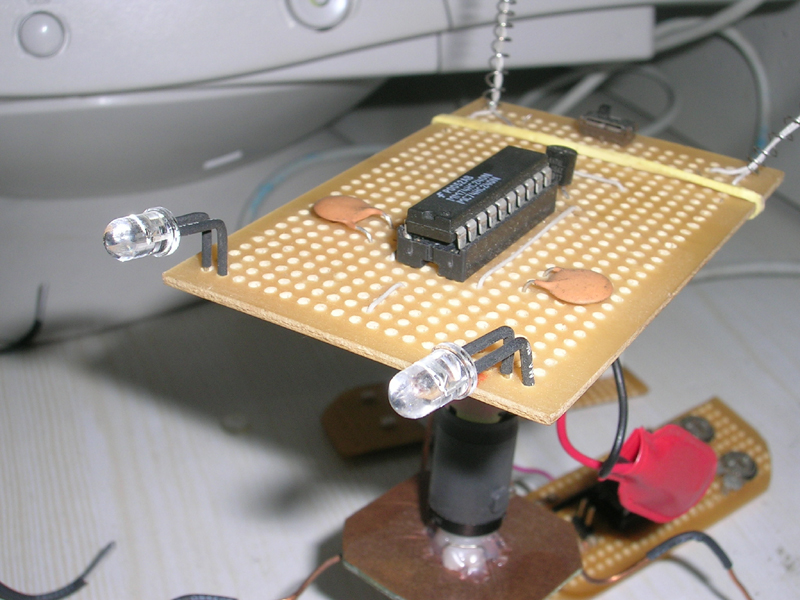
The
two photodiodes
Leds
mounted on springs
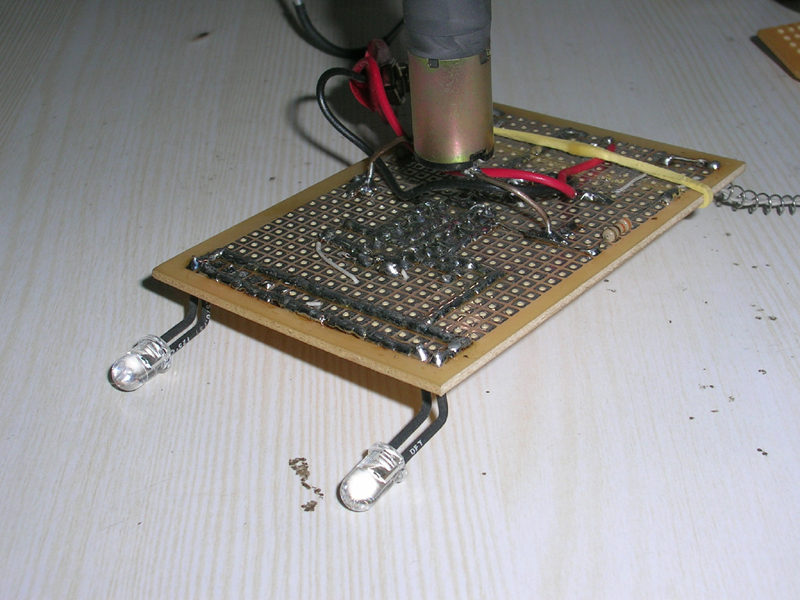
The
circuit is dead simple
Motor
connections directly soldered on to the main board
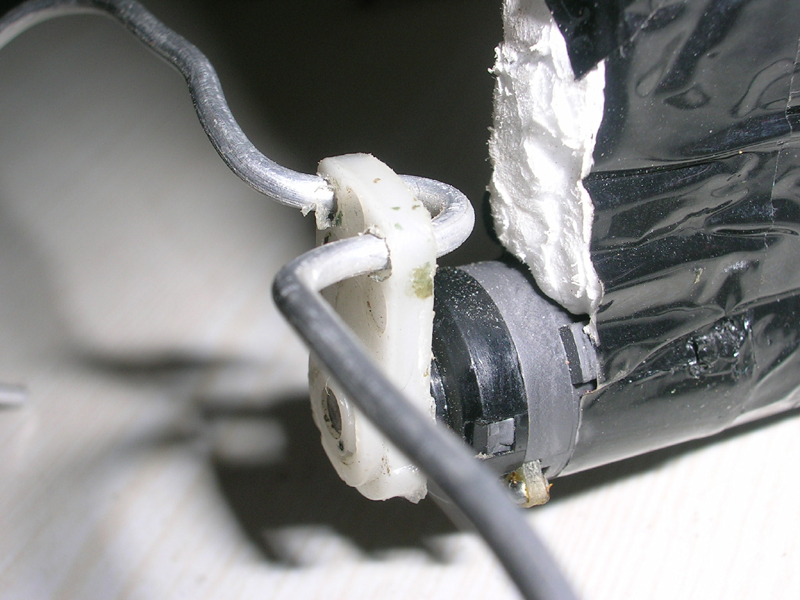
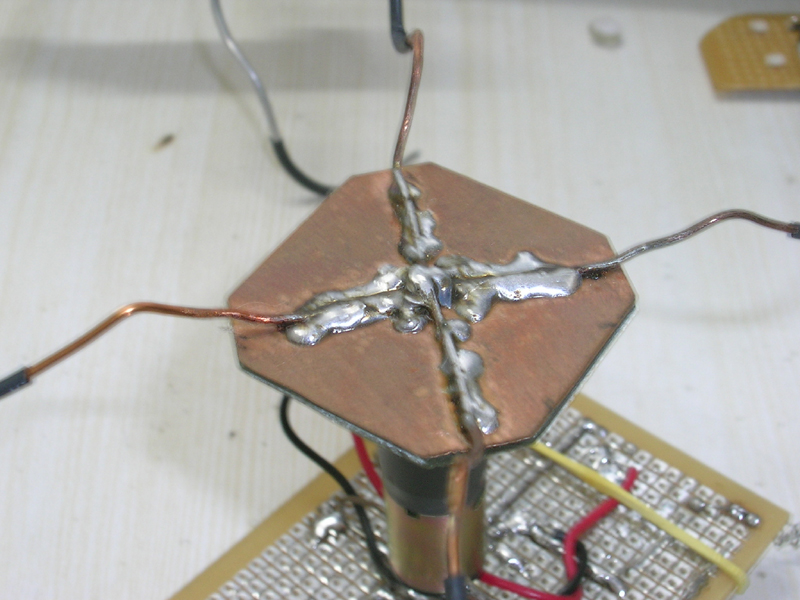
The
base legs were soldered to a small piece of pcb
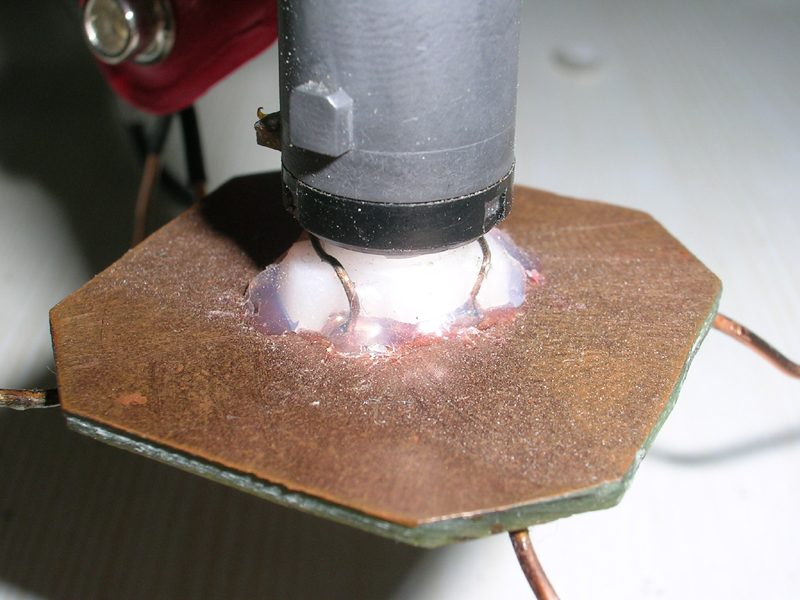
The
motor shaft was hot-glued and tied to the base pcb
Schematic:
Note:
The motors used in both the bots are miniature geared motors,
rated at 5 Volts, 60ma, 80rpm. Bigger motors will reguire
additional drivers such as the L293D chip.