| Working:
This
circuit employs 8 inverter gaits; the two in the centre
are the main control gaits while the three on either
side are used to drive the motor. Now let's see how
the circuit actually works:
Step1:When
the robot is turned on, it reverses for a moment and
then continues to move in forward direction. Initially,
the two capacitors are charging, hence the inputs 2
& 17 of the two main gaits get pulled down to ground.
This in turn makes the group of three inverters to provide
positive and negative voltage to the two motors which
makes the robot turn in backward direction. When the
capacitors are fully charged, the capacitor stops conducting
and the whole Vcc is directed towards the input of the
two main gaits, this reverses the polarity of the motors
and the robot moves forward motion.
Step2:
When one of the feeler strikes an object, it short circuits
the capacitor leading to its discharging. Therefore,
the input of the respective gait is pulled to ground
till the capacitor gets fully charged. Thus, the respective
motor is reversed, which makes the robot turn in that
direction. After the capacitor has fully charged, the
input of the gait returns to the stable state and the
robot continues to move in forward direction.
The
value of the capacitors and the resistors depends on
the angle of rotation you want your robot to make when
it strikes an object. High values will result in higher
degrees of rotation. In this robot, the caps were 0.22uf
and the resistors were 3M (They might differ in your
case).
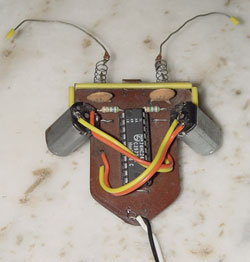
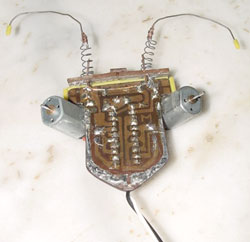
The
whole circuit should be tested on a breadboard and then
soldered on to a PCB. This will make the debugging easier
and the values can be well estimated beforehand.
Parts
List:
IC
74HC240 - 1
Capacitors (ceramic) 0.22uf - 2
Resistors 2M - 2
Motors - 2
PCB Wires, etc. |