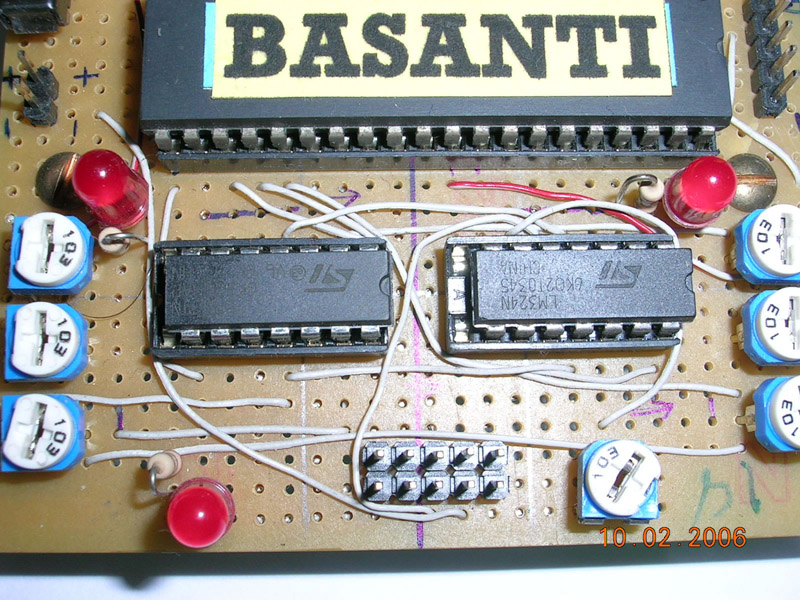
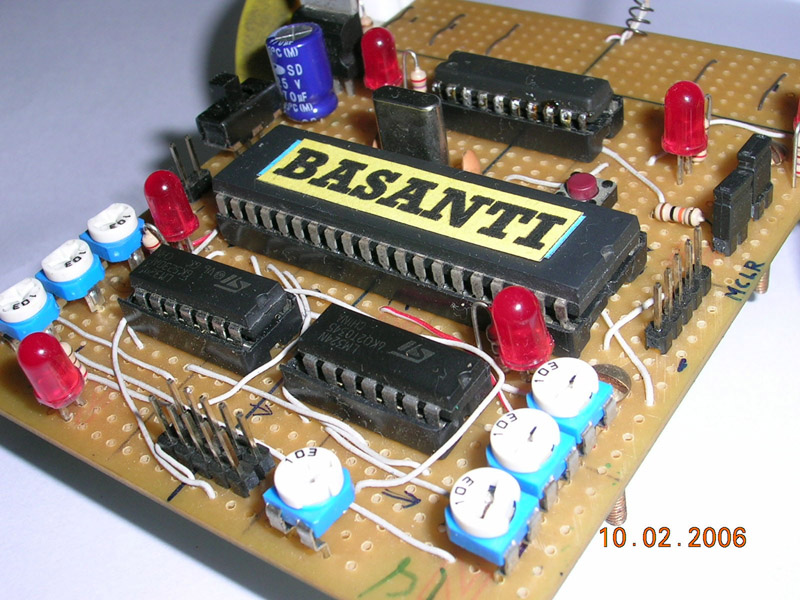
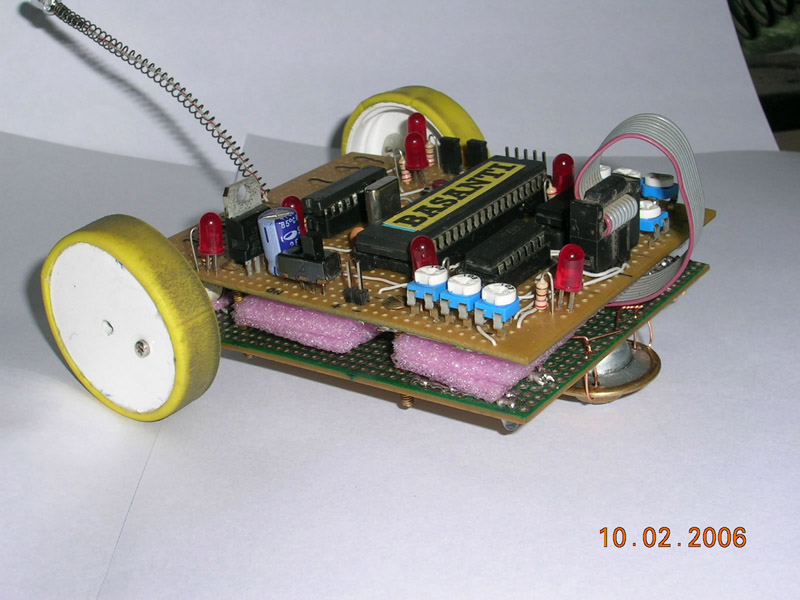
Basanti
is my second line following robot. She was specially built for
a local robotics competition. The task was to detect junctions
and the presence of mirrors (placed on the sides) while taking
appropriate turns on the way. Initially I decided to modify
my previous line follower Dizzy but
I soon realized that modifying her was as good as building a
new robot altogether. And secondly I didn’t want to program
it in assembly.
I
recently used PIC 18F452 microcontroller in one of my projects.
It is a very powerful chip and is supported by Microchip’s
very own C18 C compiler. A 60days student's trial version is
available for free download. Hence, this chip turned out to
be the obvious choice for Basanti.
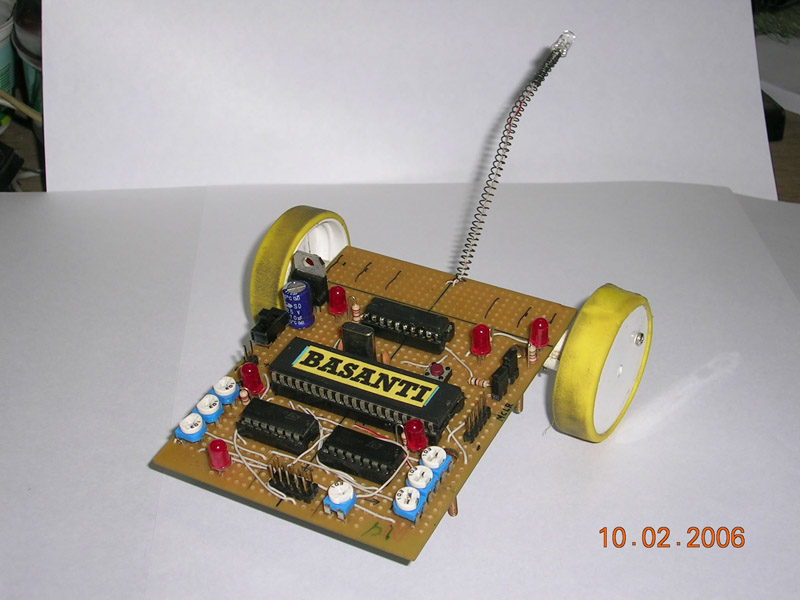
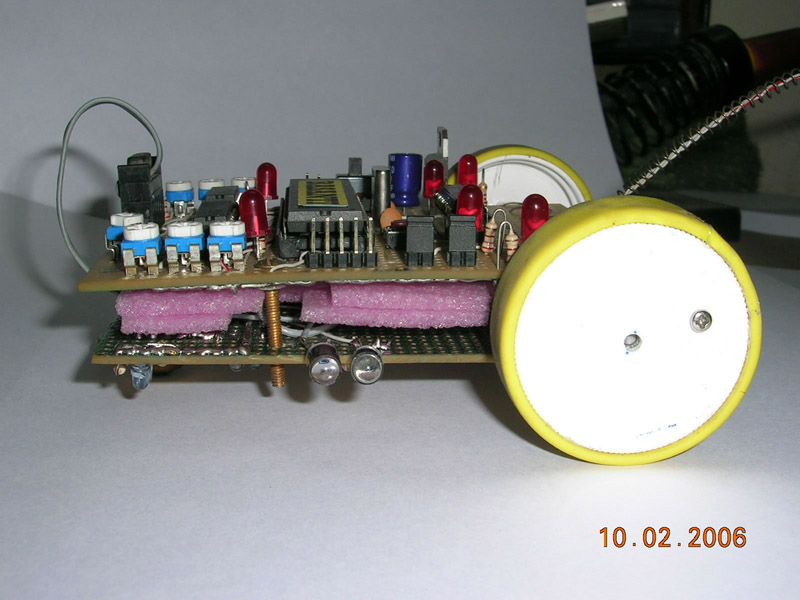
I
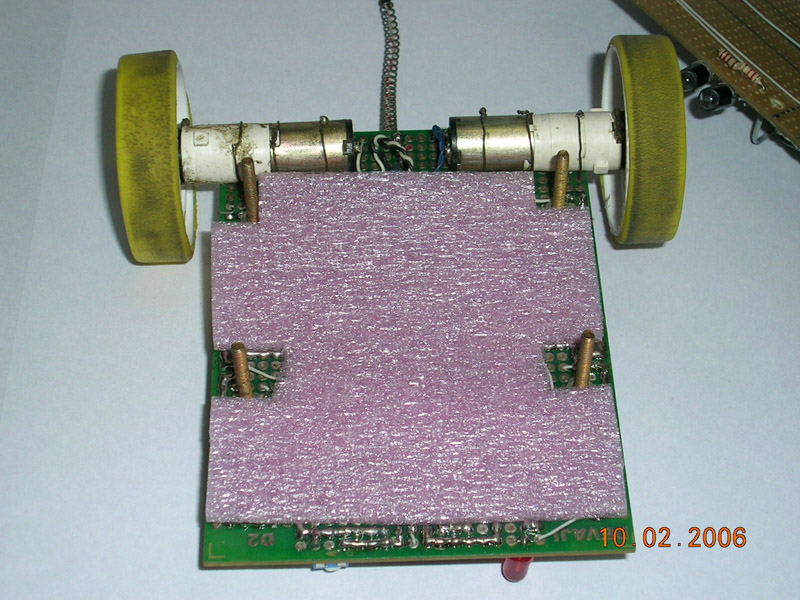
wanted to keep the design as small as possible. Small robots
are easy to handle, easy to test and above all require small
space to build. Since I have a small bedroom and an even smaller
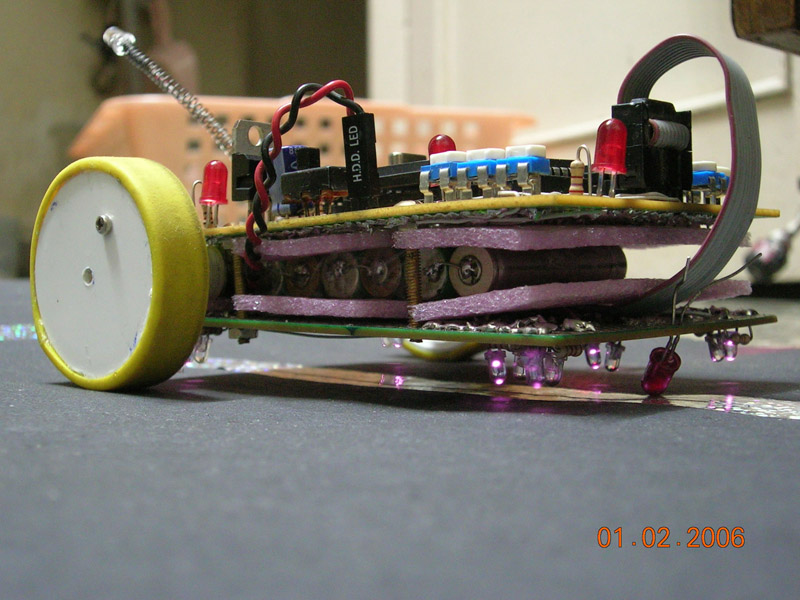
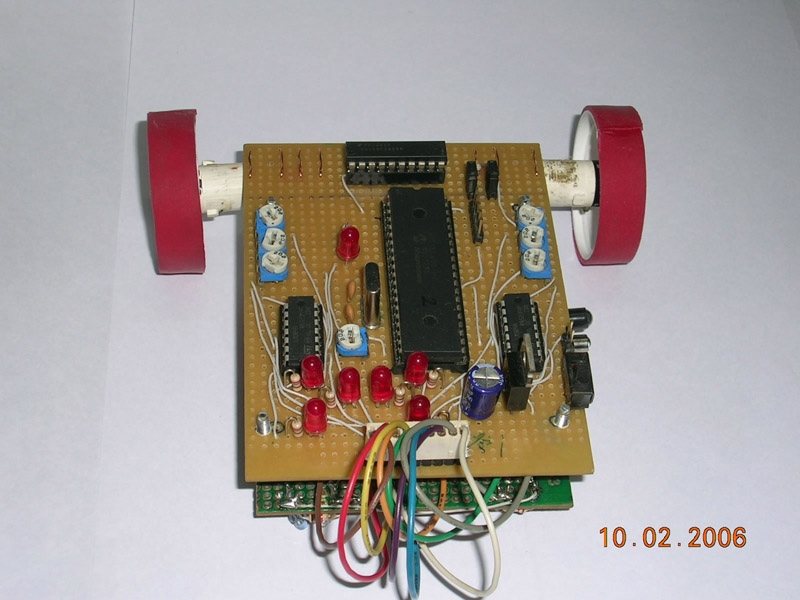
desk, the idea of keeping things small suits me perfectly. Basanti's
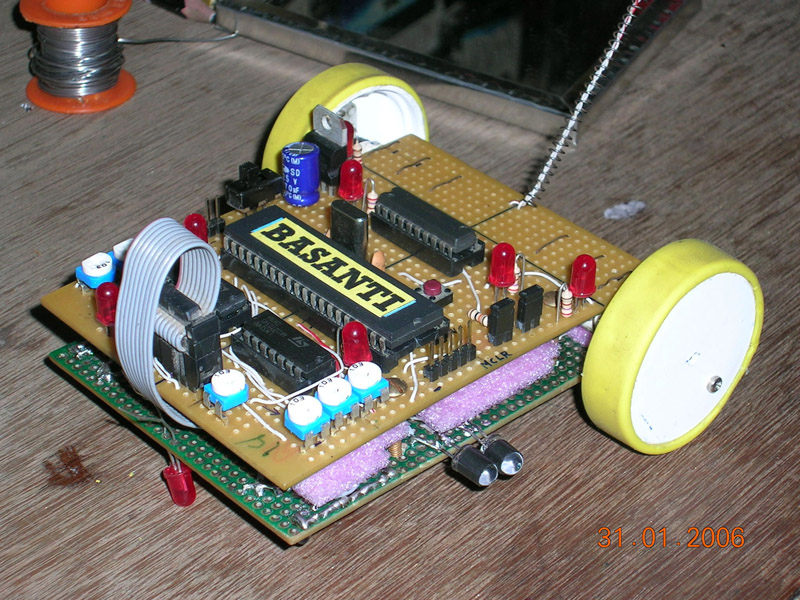
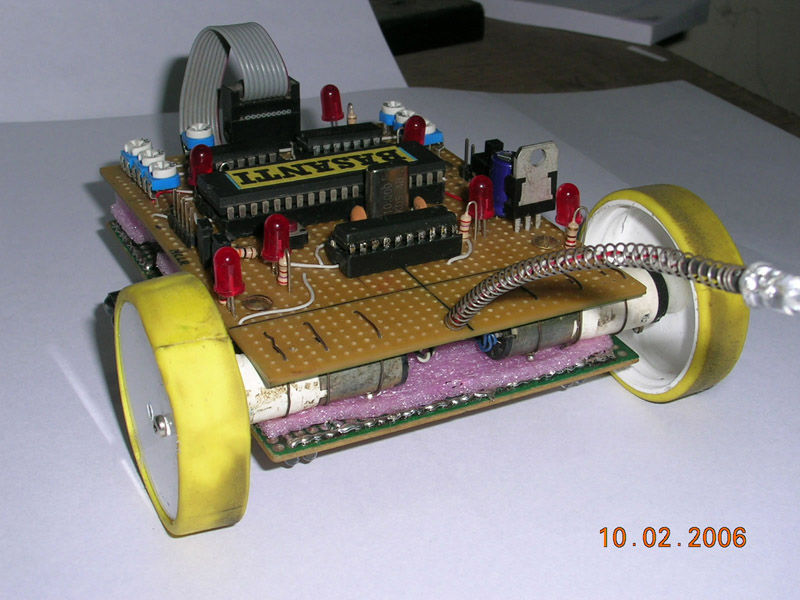
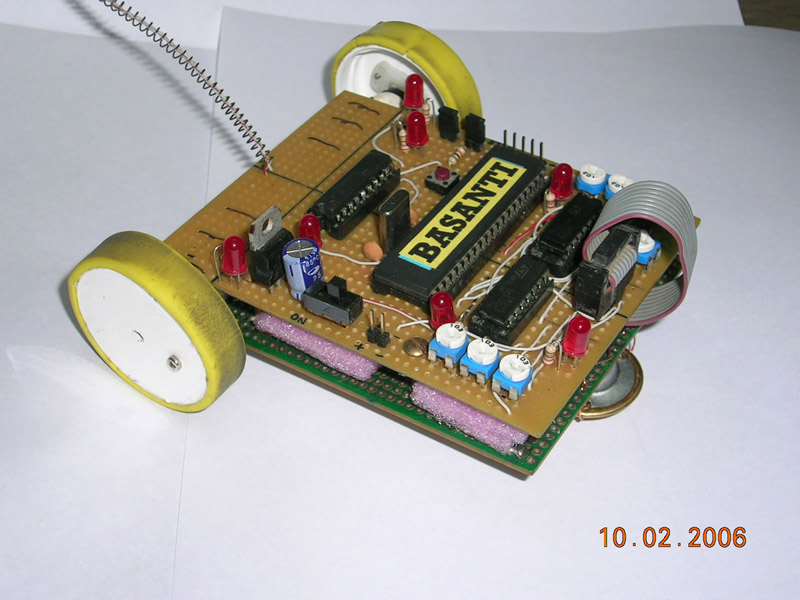
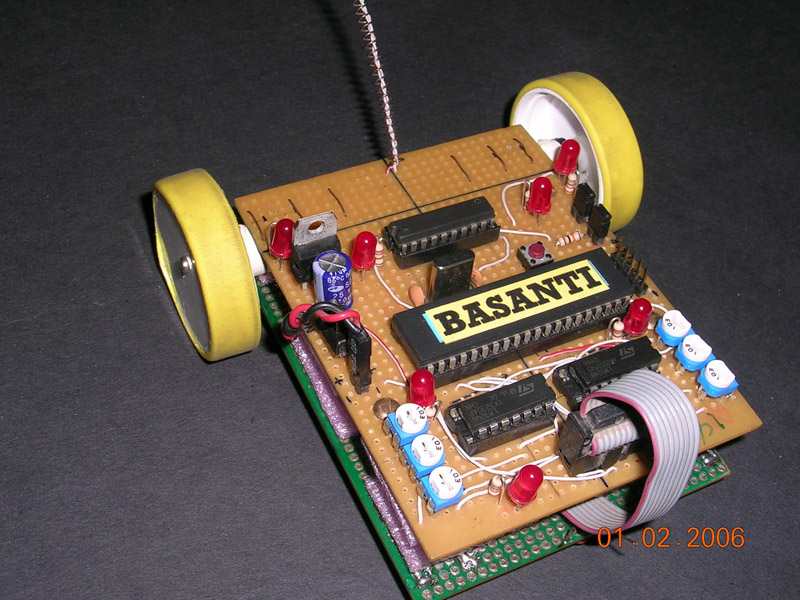
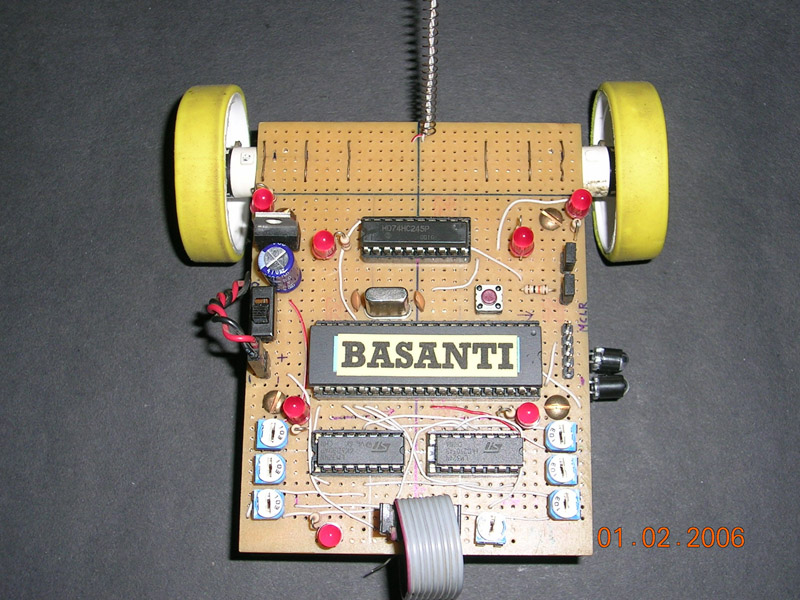
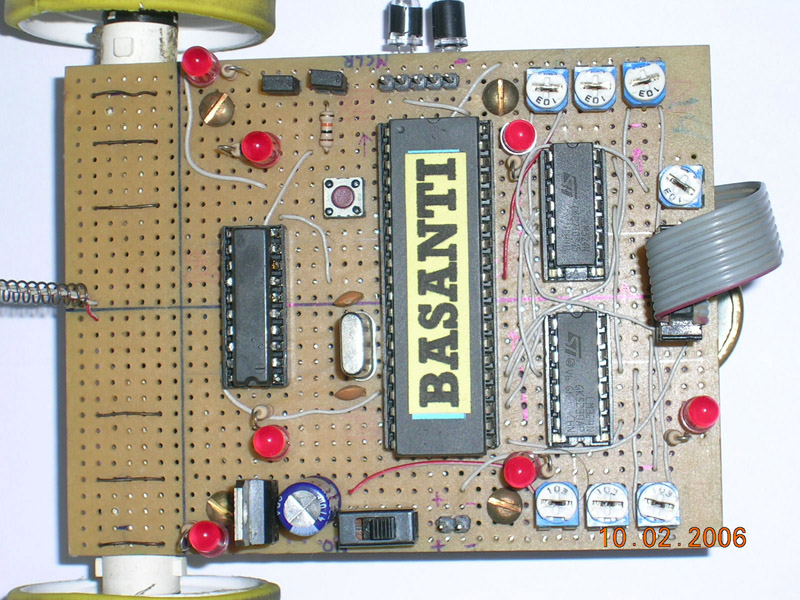
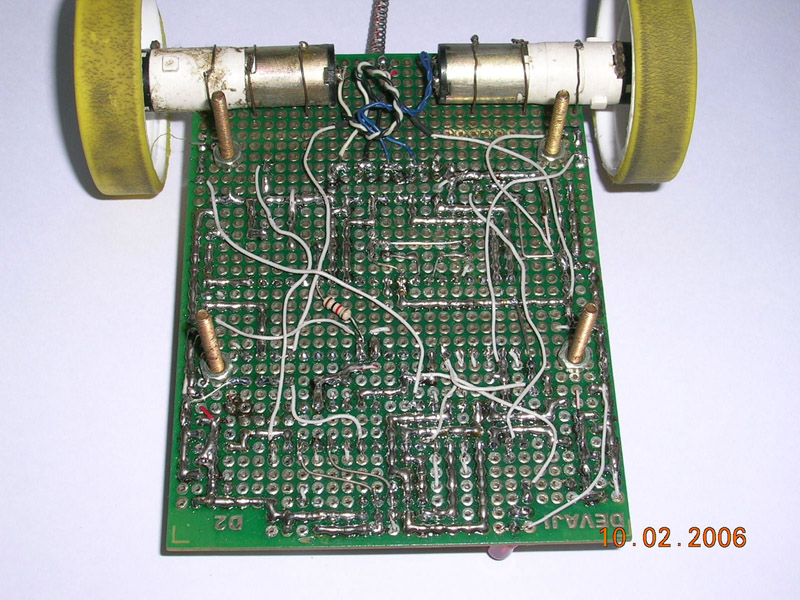
construction is very similar to Dizzy.
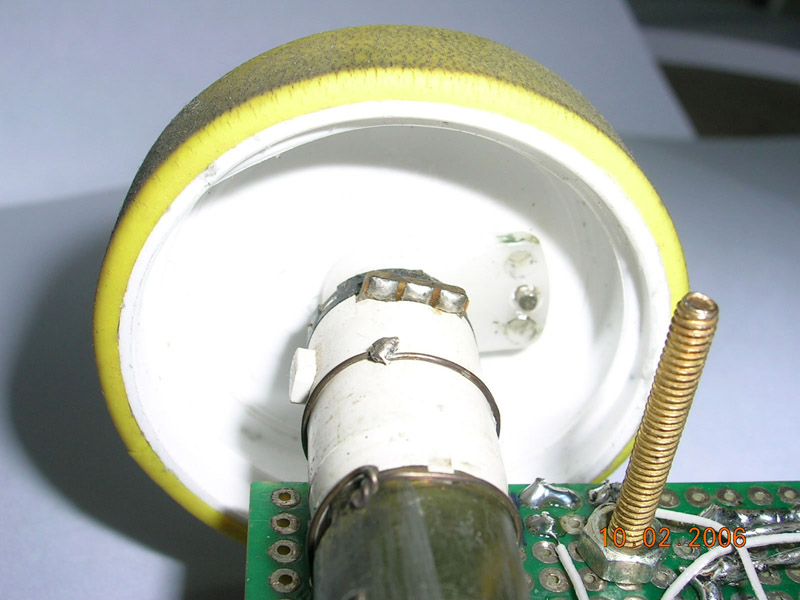
The PCB itself acts as the body of the robot, lids of old medicine
containers are used as wheels while thick rubber bands turn
into tyres. A very compact design in the end!
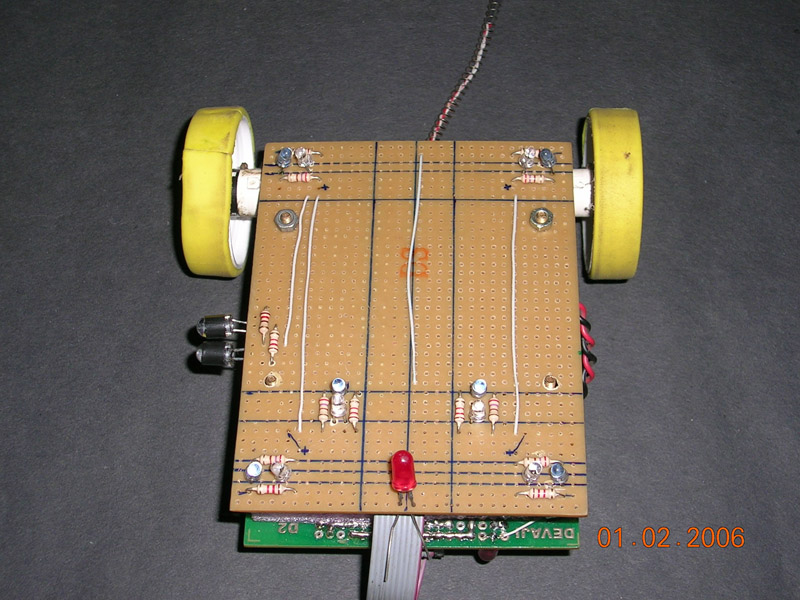
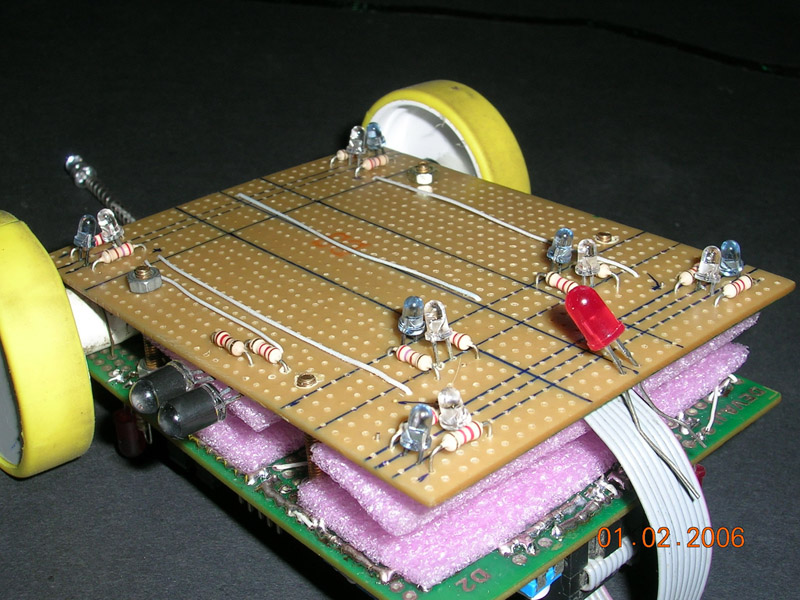
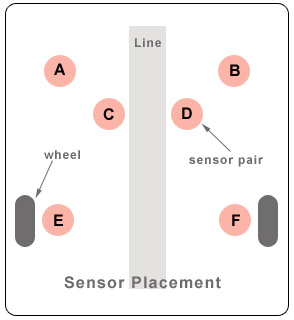
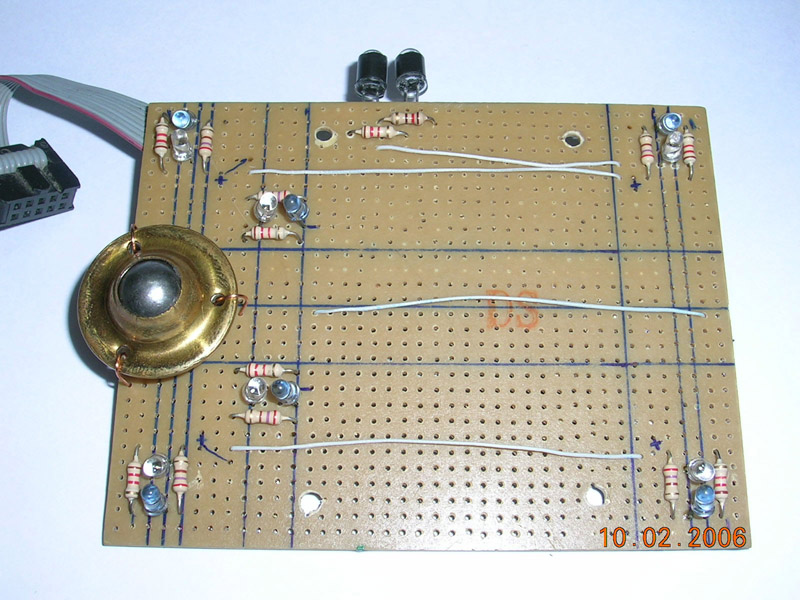
The sensors:
Basanti uses 6 infra-red emitter-detector pairs to track the
line. But only two of these pairs are used to actually follow
the line, the other four are used to detect junctions and for
alignment during turns. An additional IR sensor pair is used
to detect the presence of a mirror on her left side.
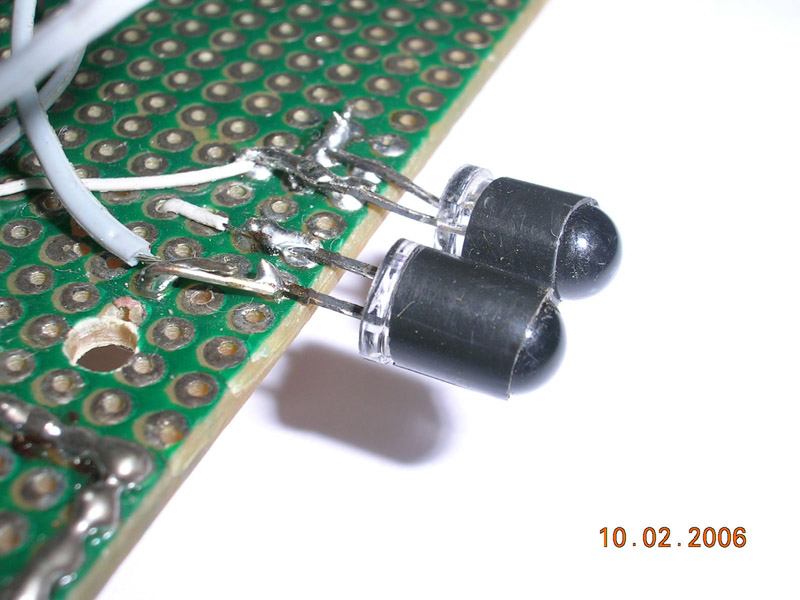
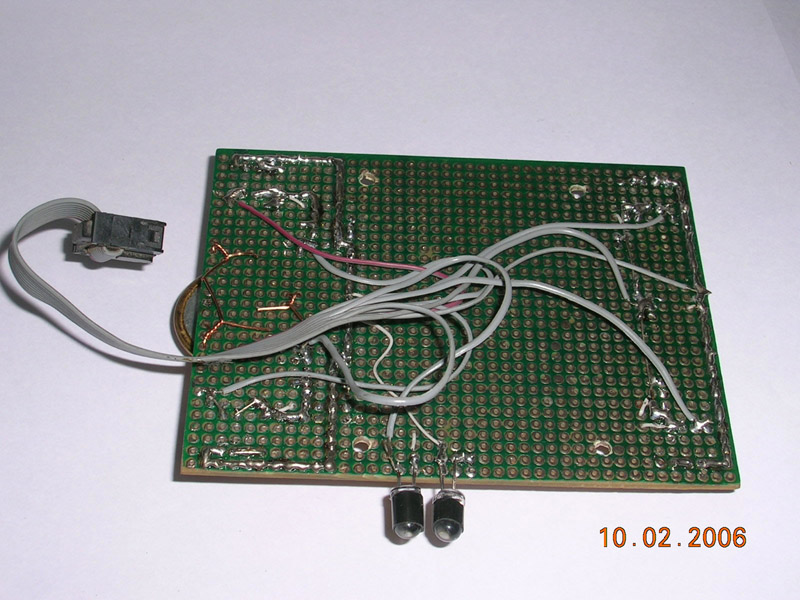
I
had a few 3mm IR emitter/detector lying around in my drawers
for a long time. They seemed to be an ideal choice for Basanti.
Due to their small size I decided to mount these sensors directly
under Basanti’s belly (on a separate bottom PCB.)
The line detector circuit is a simple comparator built using
IC LM324. The threshold is set using the 2k pot. To ensure that
the IR led doesn’t unnecessarily heat up too much, a current
limiting 270 ohm resistor is connected in series with it. The
indicator led at the output comes in handy when tuning the sensors.
The threshold can be easily adjusted to detect a white paper
line, white paint line or a sliver tape line on a black surface.
The procedure is simple, here’s how: (I would recommend
you to test this circuit on a breadboard first)
(1) Make sure the power supply is ON,
now see if the indicator led is lit or not. If lit then turn
the pot in one extreme direction so that it turns off completely
and if its not lit then first turn the pot so that it turns
ON and then turn it in the extreme opposite direction so that
it turns off. This test proves that the comparator is working
properly.
(2) Now place a white paper or the sample
material used for the line on top of the sensor pair at a distance
of about 5mm to 10mm.
(3) Then slowly turn the pot in one
direction until the indicator led just lits up.
That’s it, we now have a simple line detector ready to
use!
(TIP: To check if the IR led is working properly,
use a cell phone camera, web-cam or a digi-cam to look into
it, since CMOS/CCD sensors inside these cameras are sensitive
even to the infrared region, you’ll be able to see it
lit!)
The idea of following the line is very straight forward. Sensors
C & D are arranged such that they lie just outside the edge
of the line. The algorithm is as given below:
Sensor
C
Sensor
D
Action
0
0
Go
Straight
1
0
Turn
Left
0
1
Turn
Right
1
1
Not
Applicable
The
polling of the sensors is done continuously in a loop. The end
result is a line following robot.
/*Sample
code for a line following robot*/
void main(void)
{
while(1)
{
if(sensor_C==1 && sensor_D==0)
left ();
if(sensor_C==0 && sensor_D==1)
right ();
if(sensor_C==0 && sensor_D==0)
forward();
}
}
void
right(void) //generates suitable bit patterns for the motors
to turn right
{
left_motor1=1;
left_motor2=0;
right_motor1=0; //stops the right motor
right_motor2=0;
return;
}
void
left(void) //generates suitable bit patterns for the motors
to turn left
{
left_motor1=0; //stops the left motor
left_motor2=0;
right_motor1=0;
right_motor2=1;
return;
}
void
forward(void) //generates suitable bit patterns for the motors
to move forward
{
left_motor1=1;
left_motor2=0;
right_motor1=0;
right_motor2=1;
return;
}
Miscellaneous
Photos: (Click to enlarge)
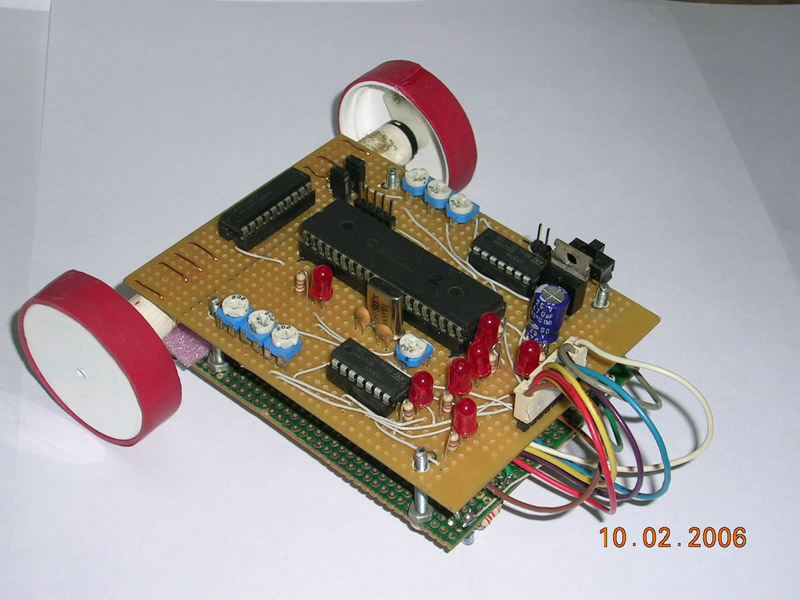
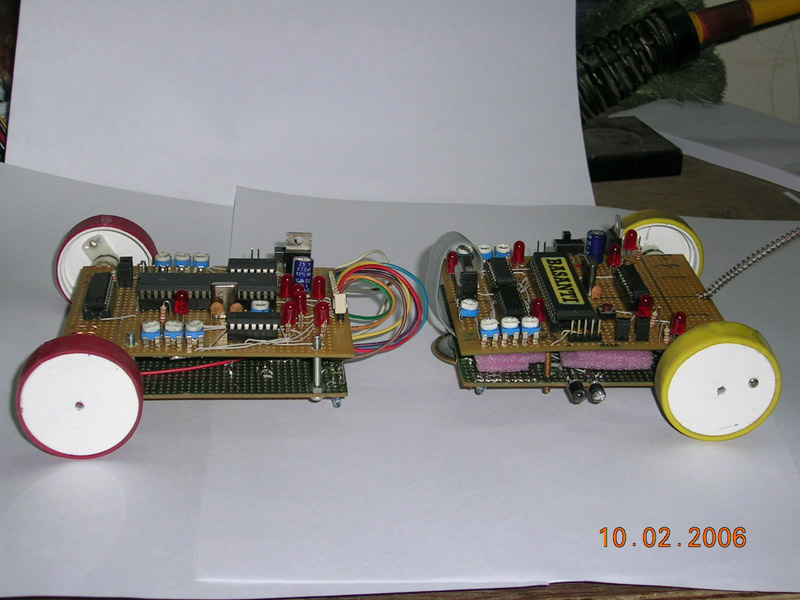
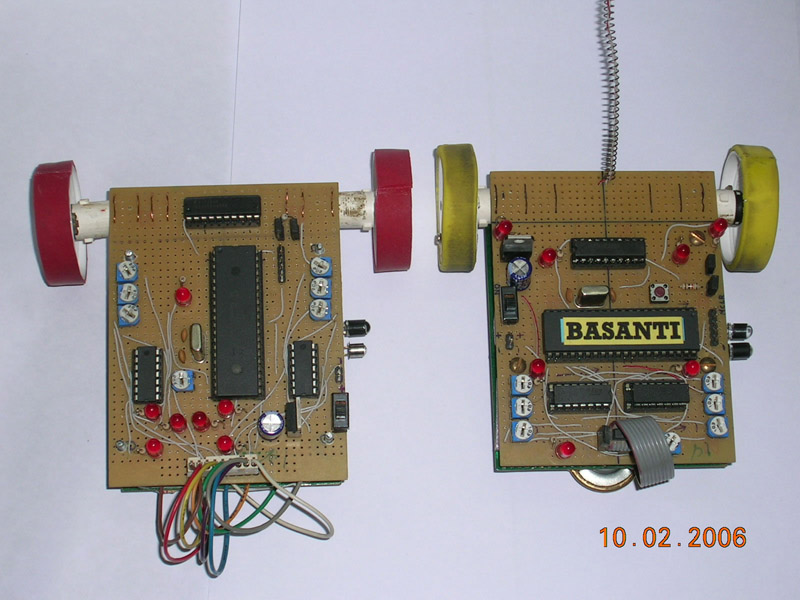
Basanti
was soon followed by a clone named "Gulabo".
Last
updated on: 1 March 2006, video added on 18 Aug 2006