Dizzy
home>robots>(my robots)dizzy
Dizzy is my first successful line following robot. It
has an average speed of 30cm/sec, enough to get him the first
prize at a local robotics competition.
Usually line following robots are considered simple to build
but what I learned from this project is that, making the robot
follow a line is the easy part, but making it go fast at the
same time is something different.

Since
Dizzy was my first line follower, I decided to keep the design
as simple as possible and started with a three sensor configuration.
When it was tested on a straight line with few smooth turns
here and there, the results were very satisfying. Then came
the bad news, Dizzy had a very hard time dealing with sharp
turns and 90 degree junctions. At higher speeds, the sensors
started overshooting the line to such an extent that the recovery
became impossible. The only solution to this problem was to
reduce the speed of the motors. But this turns out to be a huge
compromise since this robot was suppose to enter a line following
'racing' competition. I concluded that the sensor placement
was the root cause of this problem. Since the sensors were placed
too close to each other, the robot had a hard time detecting
the sharp turns at higher speeds.
At
this stage, time was running out, I had only one night left
before the competition and very few options were available.
Changing the sensor placement was not an option due to the lack
of space available on the already congested PCB. So, I finally
decided to add an extra pair of sensors. This increased the
resolution and I had more accurate data from the sensors to
work with.
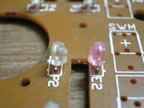
Sensors: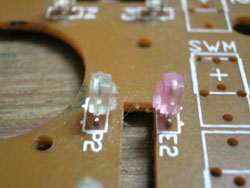
The sensors used were IR emitter and receiver pair hacked from
an old computer mouse. These are an excellent choice for such
applications. The best thing about these sensors is that they
have a very narrow beam width, so they can be placed very close
to each other without worrying about the interference. Secondly,
they are dirt cheap. You can buy an old mouse for about Rs.10
to Rs.15. Look for the really old ones since they have 4 pairs
of IR sensors while the new ones have just 2. Old is gold after
all!
Be
careful while soldering or desoldering these sensors. Since
they have very small terminals left, overheating may render
them useless ( I learned it the hard way) . And remember to
keep the supply voltage to these sensors below 2volts, otherwise
they will overheat and get damaged (again learned it the hard
way)
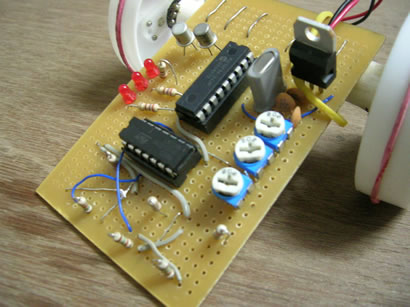
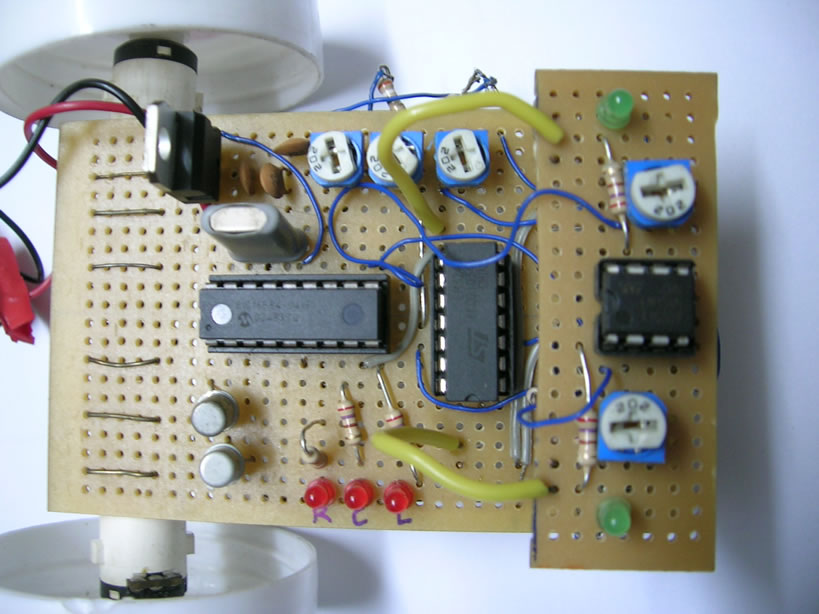
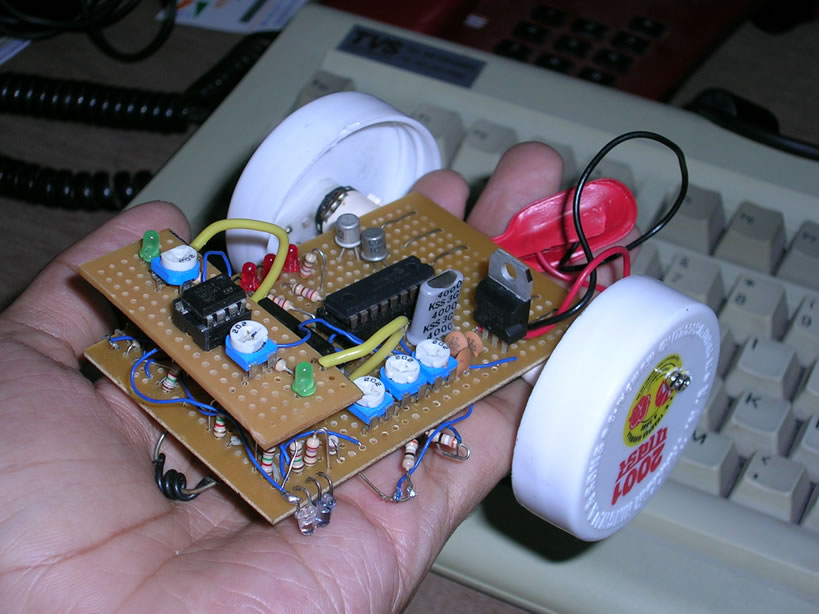
I
used an LM324 general purpose quad OpAmp IC to filter the information
coming from the sensors so that the output would go high 'only'
when a white surface was detected. The threshold voltage was
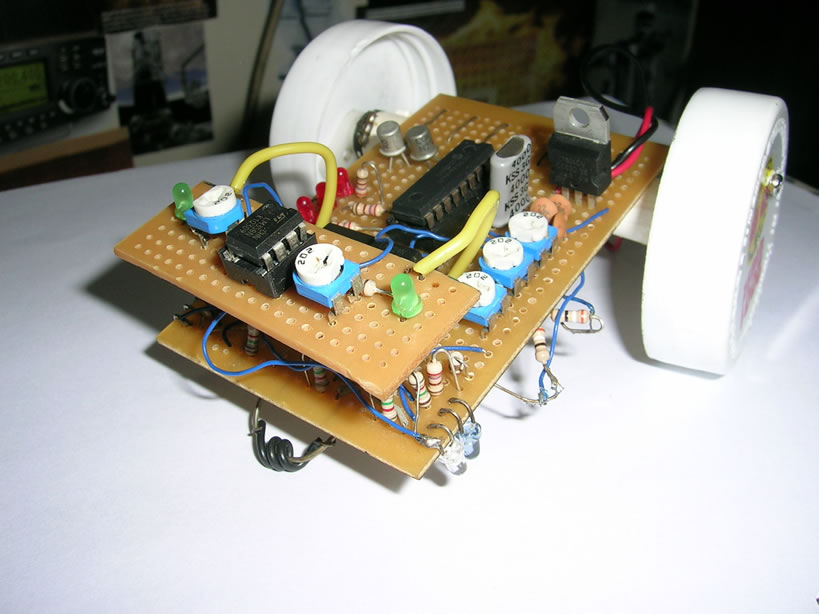
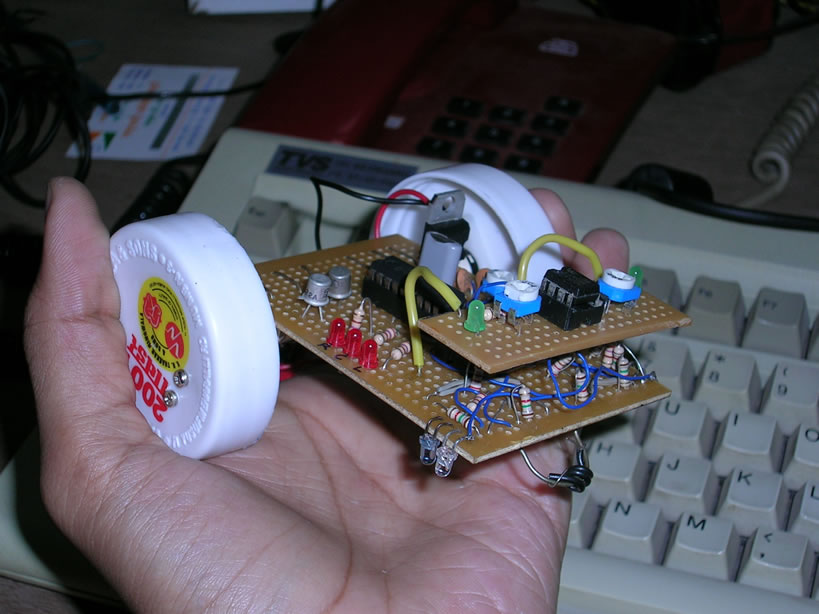
varied using a 2k pot. Later when the two extra sensors were
added, I made use of LM358 dual opamp. It was soldered on to
a new pcb and attached to the main board using a pair of stiff
wires.
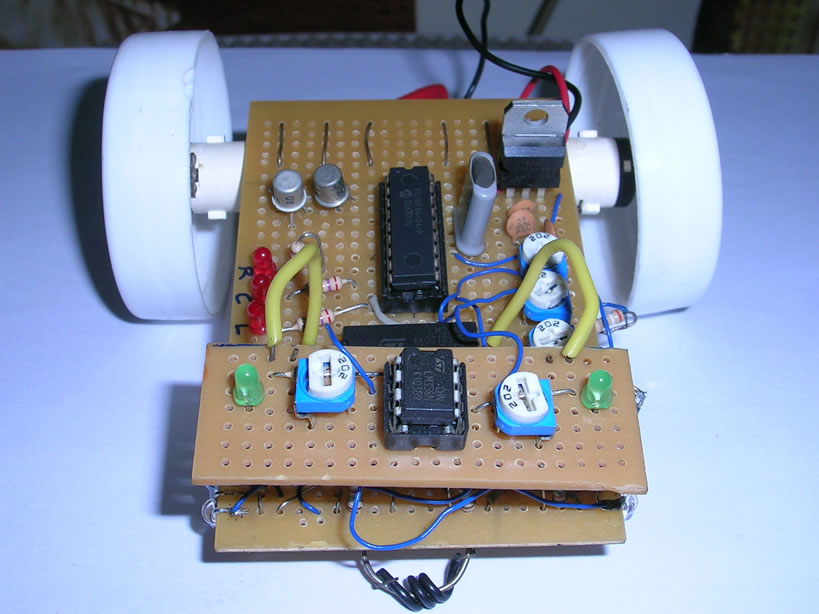
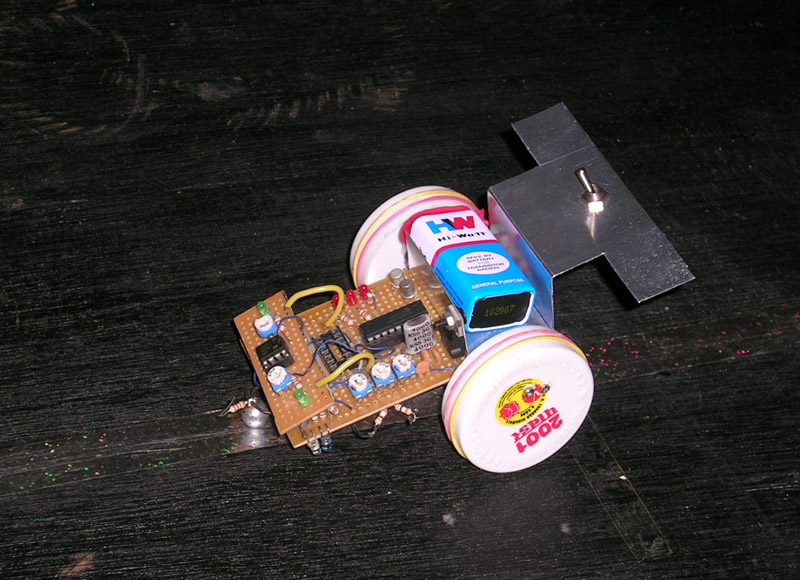
Motors:
Dizzy
uses two miniature geared motors having operating voltage of
about 3volts. They can even be driven by a single 2n2222 transistor!
Their rpm is somewhere around 60 and possess enough torque for
small applications. I bought them from Servo Electronics at
Lamington Road, Grant road east, Mumbai for Rs.200 each. These
are my personal favorites.
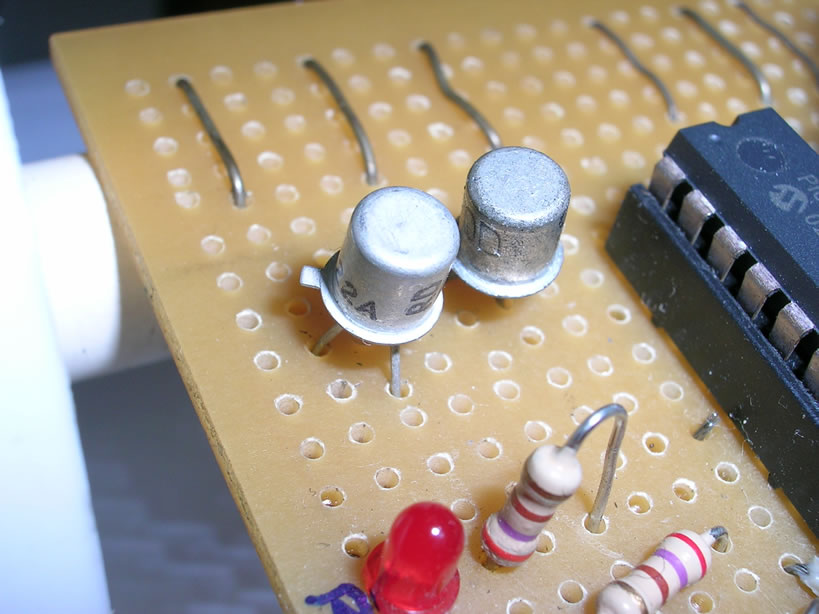
The
motors were turned on/off using 2N2222A NPN transistors, one
for each motor. Since the direction of the motors was going
to remain the same, the use of H-bridge was unnecessary.
Microcontroller:
Dizzy
uses PIC16F84A microcontroller for processing all the sensor
data and to produce the appropriate control signals for the
motors. This microcontroller is very easy to work with. The
software for dizzy was written in assembly using the MPLAB software
available freely at www.microchip.com
While
all of the 5 sensor pairs could have been used, I decided to
go with only 2 of them. Only the extreme right and left (the
new additions) were utilized. This last minute switch made all
the difference during the competition. It made dizzy work reliably
and run much faster than her competitors. Dizzy followed a zig-zag
motion while following the line, hence the name 'Dizzy'.
Now
the new software code utilizes all of the 5 sensors.
Complete
schematic can be found here.
Images:
Click
on the thumbnails to enlarge.
The IR pair on the mouse |

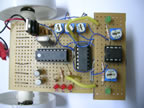
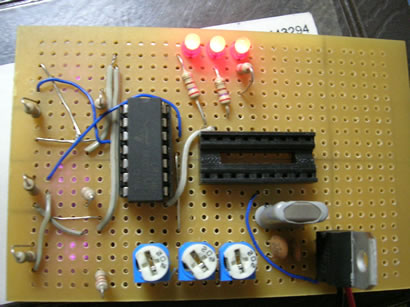
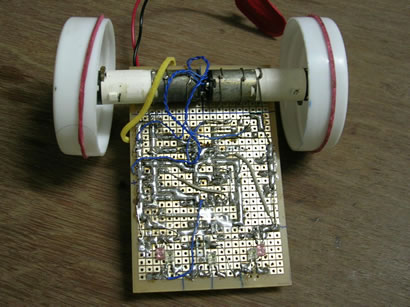
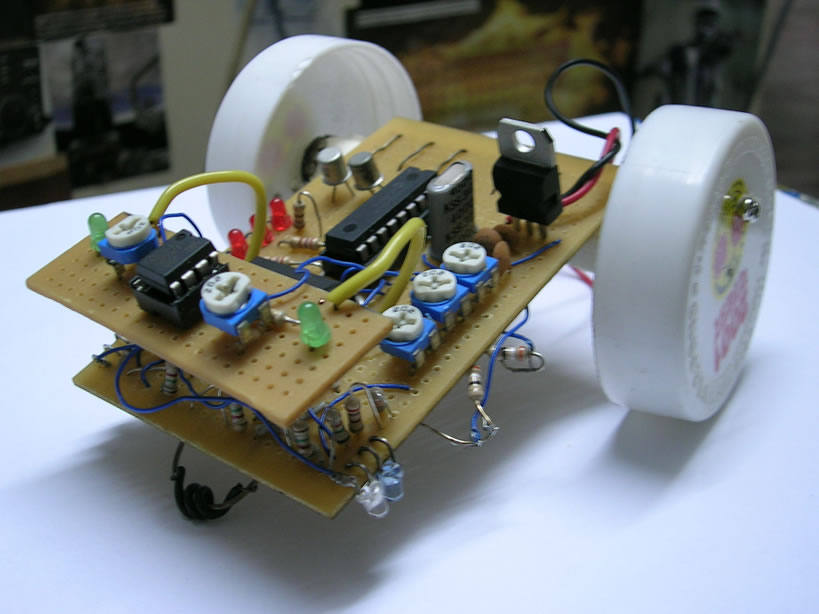
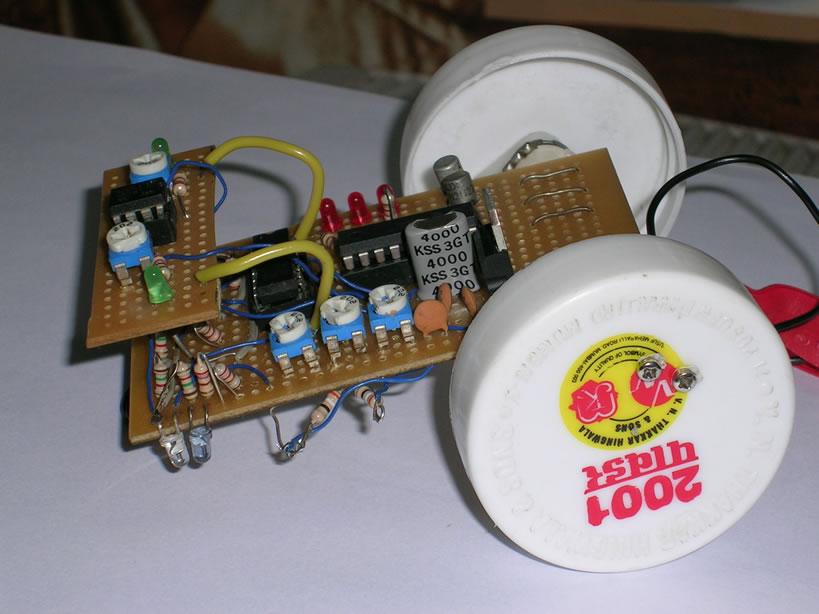
The main board |

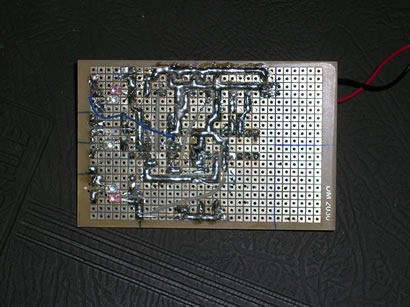
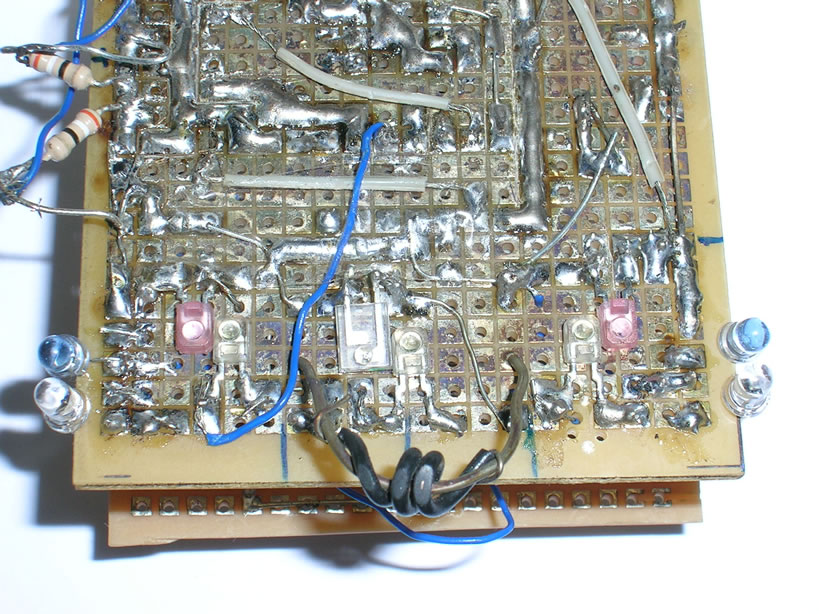
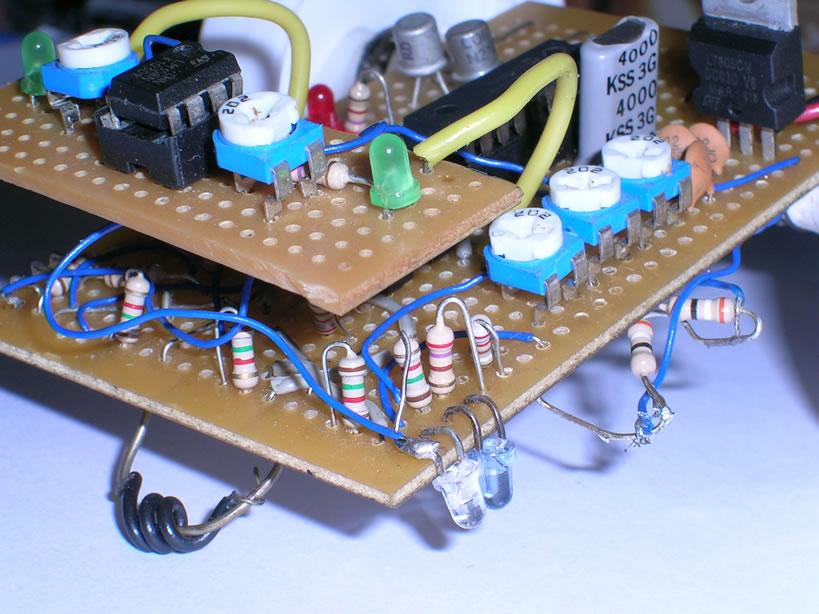
backside |

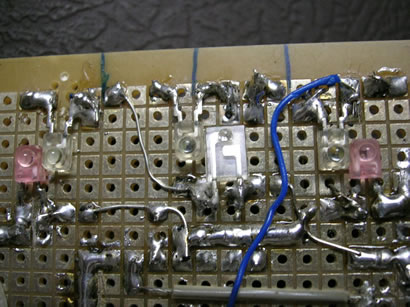
early 3 sensor configuration, off |

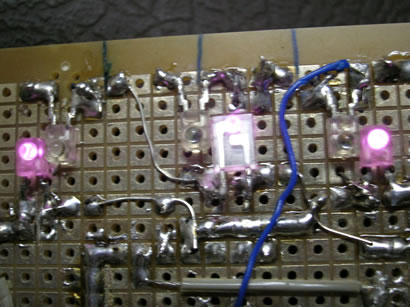
early 3 sensor configuration, on |

testing |

backside |

earlier |

earlier close up |

new |

new |

sensor close up |

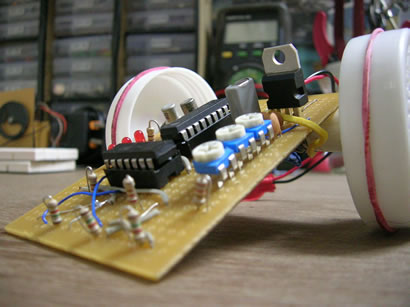
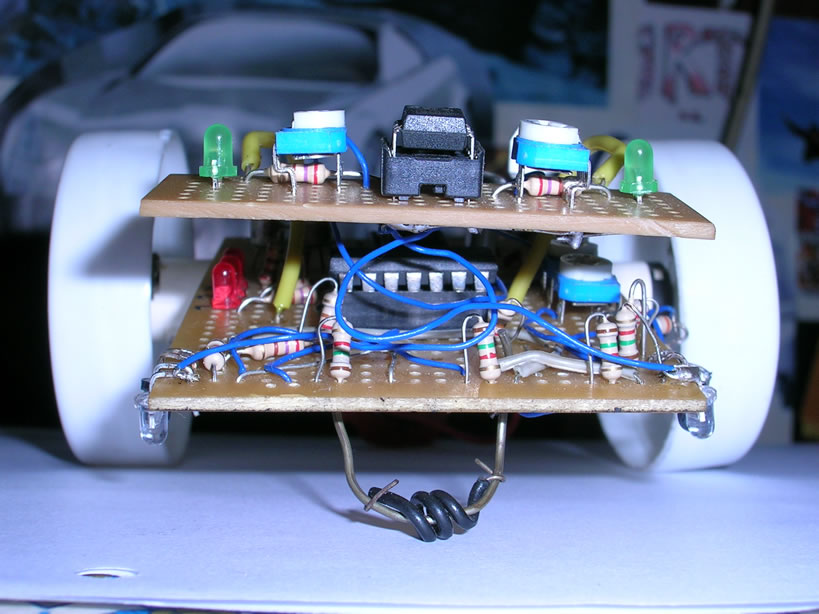
side view |

new 5 sensor configuration |

2n2222 driving transistors |
top view |

sensor close up |

top front |

front view |

it fits in my hand! |

another look |

On the track |

Close Up |
|




{kind=link}